{kind=link}
{kind=link}
{kind=link}
{kind=link}
The robot system will consist of several modules and the industrial robot. Modules for dispensing mint leaves, sugar, and lime squeezers have already been developed. Developing individual modules helps to reduce complexity and gain more control over the development process.
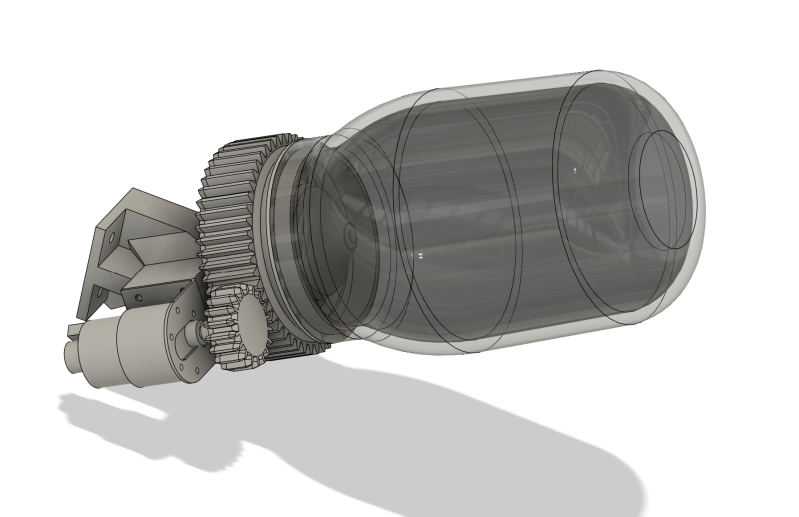
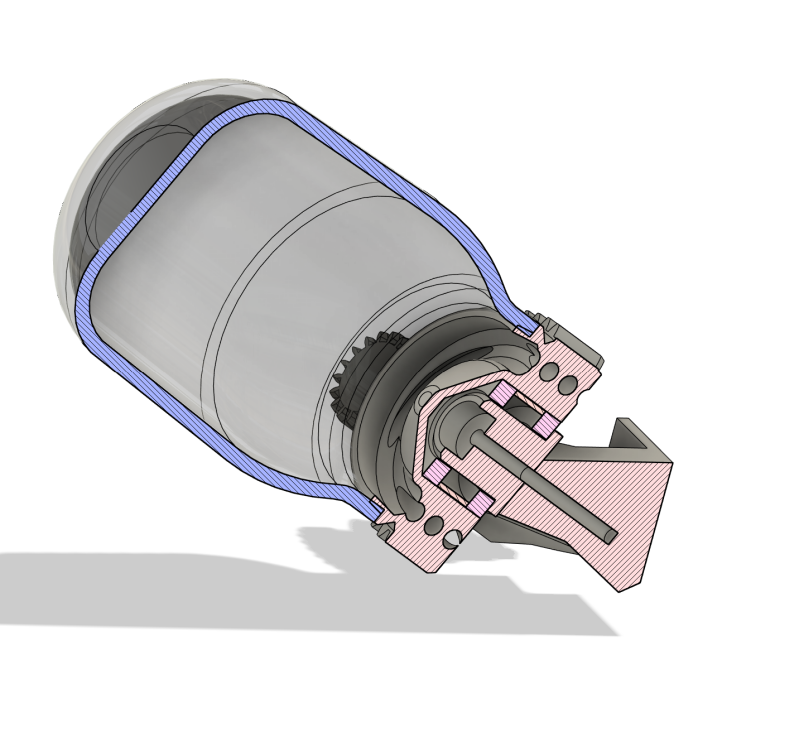
Ice Modul


This module handles one of the most important ingredients: ice. A funnel-shaped hopper stores the ice, while an integrated screw conveyor meters and transports it in a controlled manner. This ensures that each glass receives a consistent and repeatable amount of ice, without jams or spills. Designed as a standalone unit, the Ice Module fits seamlessly into the modular MojitoLisa system and keeps cool under pressure. 🧊🤖
Sugar Modul
This module takes care of precise sweetness control. Granulated sugar is stored in a rotating glass container driven by a motor. Integrated spiral channels in the lid act as dosing elements: as the container turns, the sugar gently slides through the spirals and is dispensed in a controlled and repeatable way. Simple mechanics, reliable flow, and no clumping.🍬🤖
Lime Modul
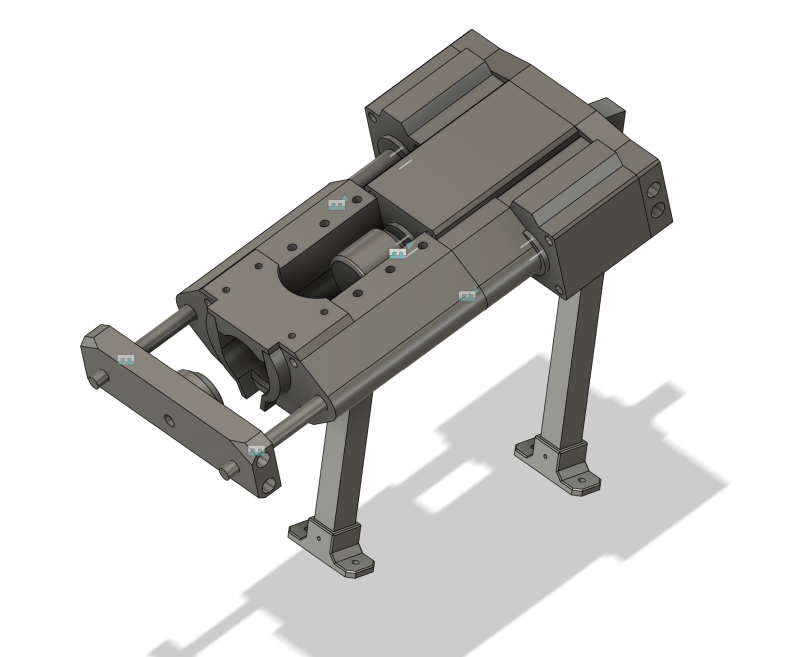
This module delivers fresh citrus power on demand. Whole limes are first cut to prevent uncontrolled bursting, then pressed with up to 3 kN of force to extract the juice efficiently. After squeezing, the remaining lime pieces are automatically released and dropped into the glass. Robust mechanics, high forces, and a lesson learned the hard way: even limes need a clean cut before the squeeze. 🍋🤖
Mint Modul




This module adds fresh mint with precision and reliability. After evaluating several dispensing concepts, a water-based vortex system with a permeable conveyor belt was developed. The design gently transports and doses mint leaves, delivering a defined quantity every time. Food-safe, robust, and surprisingly elegant. Precision handling for fresh ingredients. 🌿🤖